本发明涉及除湿机技术领域,具体地,涉及一种用于除湿机的智能控制方法以及智能控制系统。
背景技术:
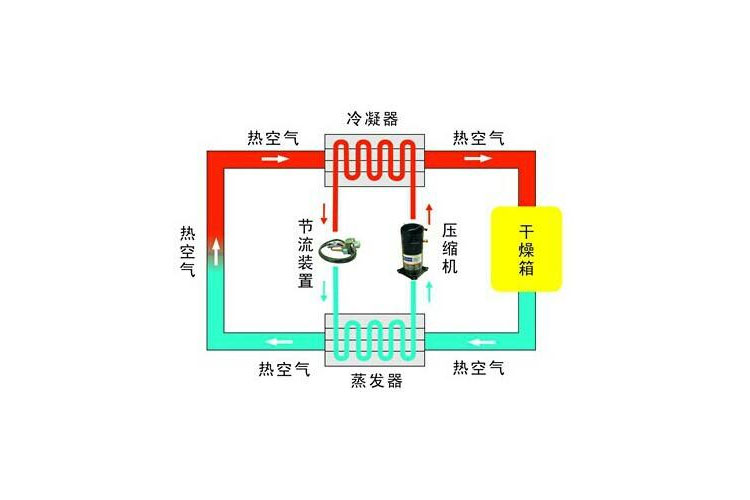
去湿机也称为除湿机、吸湿器、抽湿机,是由压缩机、热交换器、风扇、盛水器、机壳及控制器组成,其工作原理是:由风扇将潮湿空气抽入机内,通过热交换,此时空气中的水份冷凝成水珠,处理过后的干燥空气排出机外,如此循环使室内湿度降低。
现有技术中的除湿机功能单一,仅仅可以对固定的空间进行除湿操作,多个空间需要多台除湿机,便捷性和智能性已无法满足用户需求。
因此,提供一种在使用过程中不仅可以通过用户发出的远程控制指令进行运行,而且还能对不同的空间进行除湿工作,以满足用户不同需求的用于除湿机的智能控制方法以及智能控制系统是本发明亟需解决的问题。
技术实现要素:
针对上述技术问题,本发明的目的是克服现有技术中的除湿机功能单一,仅仅可以对固定的空间进行除湿操作,多个空间需要多台除湿机,便捷性和智能性已无法满足用户需求的问题,从而提供一种在使用过程中不仅可以通过用户发出的远程控制指令进行运行,而且还能对不同的空间进行除湿工作,以满足用户不同需求的用于除湿机的智能控制方法以及智能控制系统。
为了实现上述目的,本发明提供了一种用于除湿机的智能控制方法,所述方法包括:
获取多个空间分别所对应的区域位置;
获取用户控制指令,所述用户控制指令至少包括:目标空间;
自动导航除湿机至所述目标空间所对应的区域位置;
控制所述除湿机运行,以将所述目标空间的湿度改变至所述目标空间所对应的默认目标湿度值或用户控制指令中包括的指定目标湿度值。
优选地,在所述获取多个空间分别所对应的区域位置之后,所述方法还包括:
对每个空间进行自定义命名以获得每个空间对应的空间名称。
优选地,在所述对每个空间进行自定义命名以获得每个空间对应的空间名称之后,所述方法还包括:
对每个所述空间名称都预设有相对应的默认目标湿度值;其中,
当所述用户控制指令中包括有指定目标湿度值时,将所述目标空间的湿度改变至所述指定目标湿度值;否则,将所述目标空间的湿度改变至所述默认目标湿度值。
优选地,所述方法还包括:
在所述目标空间的湿度改变至所述目标空间所对应的默认目标湿度值或用户控制指令中包括的指定目标湿度值时,向用户反馈湿度调节成功信号。
优选地,所述方法还包括:
周期性检测所述除湿机中水箱的液位;其中,
在所述水箱的液位大于预设的液位阈值时,自动导航所述除湿机至预设的排水空间所对应的区域位置进行自动排水,并且向用户反馈自动排水信号。
本发明还提供了一种用于除湿机的智能控制方法系统,所述系统包括:
区域位置存储模块,用于获取多个空间分别所对应的区域位置
用户指令获取模块,用于获取用户控制指令;其中,所述用户控制指令至少包括:目标空间;
自动导航模块,用于自动导航除湿机至所述目标空间所对应的区域位置;
除湿机主控制模块,用于控制所述除湿机运行,以将所述目标空间的湿度改变至所述目标空间所对应的默认目标湿度值或用户控制指令中包括的指定目标湿度值。
优选地,所述系统还包括:
空间自定义模块,用于对每个空间进行自定义命名以获得每个空间对应的空间名称。
优选地,默认目标湿度值预设模块,用于对每个所述空间名称都预设其相对应的默认目标湿度值;
判断模块,用于判断用户控制指令中是否包括指定目标湿度值;其中,
当所述用户控制指令中包括有指定目标湿度值时,所述除湿机主控制模块将所述目标空间的湿度改变至所述指定目标湿度值;否则,
所述除湿机主控制模块将所述目标空间的湿度改变至所述默认目标湿度值。
优选地,所述系统还包括:
反馈模块,用于在所述目标空间的湿度改变至所述目标空间所对应的默认目标湿度值或用户控制指令中包括的指定目标湿度值时,向用户反馈湿度调节成功信号。
优选地,所述系统还包括:
水箱液位检测模块,用于周期性检测所述除湿机中水箱的液位;其中,
在所述水箱的液位大于预设的液位阈值时,所述除湿机主控制模块控制所述自动导航模块将所述除湿机自动导航至预设的排水空间所对应的区域位置进行自动排水,并且反馈模块向用户反馈自动排水信号。
根据上述技术方案,本发明提供的用于除湿机的智能控制方法和智能控制系统在工作时的有益效果为:可以控制除湿机自动导航至目标空间进行除湿工作,还可以自动切换除湿空间,从而实现对多个空间进行除湿工作,满足用户的不同需求,便捷性和工作效率都有保证。
本发明的其他特征和优点将在随后的具体实施方式部分予以详细说明;而且本发明中未涉及部分均与现有技术相同或可采用现有技术加以实现。
附图说明
附图是用来提供对本发明的进一步理解,并且构成说明书的一部分,与下面的具体实施方式一起用于解释本发明,但并不构成对本发明的限制。在附图中:
图1是本发明的一种优选的实施方式中提供的用于除湿机的智能控制方法的流程图;
图2是本发明的一种优选的实施方式中提供的用于除湿机的智能控制方法的流程图;
图3是本发明的一种优选的实施方式中提供的用于除湿机的智能控制系统的结构框图;
图4是本发明的一种优选的实施方式中提供的用于除湿机的智能控制系统的结构框图。
附图标记说明
1区域位置存储模块2用户指令获取模块
3自动导航模块4除湿机主控制模块
5空间自定义模块6默认目标湿度值预设模块
7判断模块8反馈模块
9水箱液位检测模块
具体实施方式
以下结合附图对本发明的具体实施方式进行详细说明。应当理解的是,此处所描述的具体实施方式仅用于说明和解释本发明,并不用于限制本发明。
在本发明中,在未作相反说明的情况下,“上、下、内、外”等包含在术语中的方位词仅代表该术语在常规使用状态下的方位,或为本领域技术人员理解的俗称,而不应视为对该术语的限制。
如图1和图2所示,本发明提供了一种用于除湿机的智能控制方法,所述方法包括:
获取多个空间分别所对应的区域位置;
获取用户控制指令,所述用户控制指令至少包括:目标空间;
自动导航除湿机至所述目标空间所对应的区域位置;
控制所述除湿机运行,以将所述目标空间的湿度改变至所述目标空间所对应的默认目标湿度值或用户控制指令中包括的指定目标湿度值。
在上述方案中,对于多个空间分别所对应的区域位置可以直接向所述除湿机预设地图数据,也可以控制所述除湿机在整个工作区域中移动,在移动的过程中获取整个工作区域的图像信息以及位置信息,以自动生成所对应的地图数据;所述用户控制指令一般是通过通讯模块向所述除湿机发送的,为了保证通讯的即时性,可以使用5g通讯模块,采用5g通讯信号进行指令传输,自动导航则可以采用测距导航技术,一般室内采用的是zigbee测距导航方式等。我国已有一些学者对室内zigbee导航进行了研究。杭州电子科技大学的章坚武等人利用ti公司cc2430的zigbee芯片在室内进行了测距精度测试,测试结果表面精度可以控制在2m以内。中南大学的张橙,宋学瑞等人对传感器的原始数据进行了卡尔曼滤波处理后,使得测试精度可以控制在0.5m以内,实现了较高的精度,目前,在室内导航领域,已有很多工程师采用了zigbee导航的方法。
在本发明的一种优选的实施方式中,在所述获取多个空间分别所对应的区域位置之后,所述方法还包括:
对每个空间进行自定义命名以获得每个空间对应的空间名称。
在上述方案中,对每个空间自定义空间名称,可以方便用户发出控制指令,以准确地将所述除湿机自动导航至该空间内进行除湿工作,例如可以自定义为:第一生产车间、第二生产车间、财务办公室等等,用户可以根据自身的需求自定义控件名称,也方便后期对其发出控制指令。
在本发明的一种优选的实施方式中,在所述对每个空间进行自定义命名以获得每个空间对应的空间名称之后,所述方法还包括:
对每个所述空间名称都预设有相对应的默认目标湿度值;其中,
当所述用户控制指令中包括有指定目标湿度值时,将所述目标空间的湿度改变至所述指定目标湿度值;否则,将所述目标空间的湿度改变至所述默认目标湿度值。
在上述方案中,用户发出的控制指令中可以包含指定目标湿度值也可以不包含指定目标湿度值,因为每个空间所需要达到的湿度值基本是保持不变的,为了方便用户的控制,每个空间就预设有默认目标湿度值,这样在指令中没有指定目标湿度值时,说明用户对该空间的湿度需求是常规不变的,则无需再进行特别的说明,除非用户需要改变该空间的目标湿度值,所以可以认为所述指定目标湿度值指令的优先级是高于所述默认目标湿度值指令的,这种控制逻辑也更加的人性化,便于用户对除湿机进行智能控制。
在本发明的一种优选的实施方式中,所述方法还包括:
在所述目标空间的湿度改变至所述目标空间所对应的默认目标湿度值或用户控制指令中包括的指定目标湿度值时,向用户反馈湿度调节成功信号。
在上述方案中,在湿度调节成功后通知用户,这样用户可以清楚地了解除湿工作的进度,而且在完成湿度调节后可以控制所述除湿机对另外的空间进行湿度调节,保证除湿机的工作效果。
在本发明的一种优选的实施方式中,所述方法还包括:
周期性检测所述除湿机中水箱的液位;其中,
在所述水箱的液位大于预设的液位阈值时,自动导航所述除湿机至预设的排水空间所对应的区域位置进行自动排水,并且向用户反馈自动排水信号。
在上述方案中,所述除湿机的水箱承载能力是有有限的,所以本发明中需要对水箱的液位进行周期性检测,以防止发生水箱溢流的问题发生,当所述水箱的液位大于预设的液位阈值时,则控制自动导航所述除湿机至预设的排水空间所对应的区域位置进行自动排水,以保证除湿机的工作能力,当然在排水后需要通知用户,使得用户清楚地了解除湿机的工作情况。
根据上述内容,本发明提供的除湿机的智能控制方法的工作原理为:可以直接向所述除湿机预设地图数据;也可以控制所述除湿机在整个工作区域中移动,在移动的过程中获取整个工作区域的图像信息以及位置信息,以自动生成所对应的地图数据,然后获取用户控制指令,根据所述用户控制指令对除湿机进行控制,例如用户控制指令为:第一生产车间,则控制除湿机自动导航至所述第一生产车间所对应的位置,然后启动进行除湿工作,因为这时候所述用户控制指令中不包括指定目标湿度值,此时第一生产车间所对应的默认目标湿度值a就是控制所依据的目标值,将所述第一生产车间的湿度调节至湿度值a后,则完成湿度调节,此时向用户发送调节成功信号,等待用户的进一步指令,例如进一步控制指令为第二生产车间+目标湿度值b1,则自动导航所述除湿机至所述第二生产车间对应的区域位置,启动进行除湿工作,以将所述第二生产车间内的湿度调节至湿度值b1时则完成调节工作,在工作过程中周期性检测所述除湿机中水箱的液位,如果所述水箱的液位大于预设的液位阈值时,自动导航所述除湿机至预设的排水空间所对应的区域位置进行自动排水,并且向用户反馈自动排水信号。从而实现对所述除湿机的智能控制。
如图3和图4所示,本发明还提供了一种用于除湿机的智能控制方法系统,所述系统包括:
区域位置存储模块1,用于获取多个空间分别所对应的区域位置
用户指令获取模块2,用于获取用户控制指令;其中,所述用户控制指令至少包括:目标空间;
自动导航模块3,用于自动导航除湿机至所述目标空间所对应的区域位置;
除湿机主控制模块4,用于控制所述除湿机运行,以将所述目标空间的湿度改变至所述目标空间所对应的默认目标湿度值或用户控制指令中包括的指定目标湿度值。
在本发明的一种优选的实施方式中,所述系统还包括:
空间自定义模块5,用于对每个空间进行自定义命名以获得每个空间对应的空间名称。
在本发明的一种优选的实施方式中,所述系统还包括:
默认目标湿度值预设模块6,用于对每个所述空间名称都预设其相对应的默认目标湿度值;
判断模块7,用于判断用户控制指令中是否包括指定目标湿度值;其中,
当所述用户控制指令中包括有指定目标湿度值时,所述除湿机主控制模块将所述目标空间的湿度改变至所述指定目标湿度值;否则,
所述除湿机主控制模块将所述目标空间的湿度改变至所述默认目标湿度值。
在本发明的一种优选的实施方式中,所述系统还包括:
反馈模块8,用于在所述目标空间的湿度改变至所述目标空间所对应的默认目标湿度值或用户控制指令中包括的指定目标湿度值时,向用户反馈湿度调节成功信号。
在本发明的一种优选的实施方式中,所述系统还包括:
水箱液位检测模块9,用于周期性检测所述除湿机中水箱的液位;其中,
在所述水箱的液位大于预设的液位阈值时,所述除湿机主控制模块控制所述自动导航模块将所述除湿机自动导航至预设的排水空间所对应的区域位置进行自动排水,并且反馈模块向用户反馈自动排水信号。
根据上述内容,所述用于除湿机的智能控制系统的工作原理为:可以直接向所述除湿机预设地图数据;也可以控制所述除湿机在整个工作区域中移动,在移动的过程中获取整个工作区域的图像信息以及位置信息,以自动生成所对应的地图数据,然后获取用户控制指令,根据所述用户控制指令对除湿机进行控制,例如用户控制指令为:第一生产车间,则控制除湿机自动导航至所述第一生产车间所对应的位置,然后启动进行除湿工作,因为这时候所述用户控制指令中不包括指定目标湿度值,此时第一生产车间所对应的默认目标湿度值a就是控制所依据的目标值,将所述第一生产车间的湿度调节至湿度值a后,则完成湿度调节,此时向用户发送调节成功信号,等待用户的进一步指令,例如进一步控制指令为第二生产车间+目标湿度值b1,则自动导航所述除湿机至所述第二生产车间对应的区域位置,启动进行除湿工作,以将所述第二生产车间内的湿度调节至湿度值b1时则完成调节工作,在工作过程中周期性检测所述除湿机中水箱的液位,如果所述水箱的液位大于预设的液位阈值时,自动导航所述除湿机至预设的排水空间所对应的区域位置进行自动排水,并且向用户反馈自动排水信号。从而实现对所述除湿机的智能控制。
综上所述,本发明提供的用于除湿机的智能控制方法以及智能控制系统克服现有技术中的除湿机功能单一,仅仅可以对固定的空间进行除湿操作,多个空间需要多台除湿机,便捷性和智能性已无法满足用户需求的问题。
以上结合附图详细描述了本发明的优选实施方式,但是,本发明并不限于上述实施方式中的具体细节,在本发明的技术构思范围内,可以对本发明的技术方案进行多种简单变型,这些简单变型均属于本发明的保护范围。
另外需要说明的是,在上述具体实施方式中所描述的各个具体技术特征,在不矛盾的情况下,可以通过任何合适的方式进行组合,为了避免不必要的重复,本发明对各种可能的组合方式不再另行说明。
此外,本发明的各种不同的实施方式之间也可以进行任意组合,只要其不违背本发明的思想,其同样应当视为本发明所公开的内容。